Hey gang, sorry I’ve been away for a while…
I used this color sensor in a production project about 8 years ago  I don’t know if this is useful, but here’s some of my code for reference. It worked quite well and I was able to detect the color objects passing by the sensor at a pretty decent rate. It was a pretty integral part of the machine.
I don’t know if this is useful, but here’s some of my code for reference. It worked quite well and I was able to detect the color objects passing by the sensor at a pretty decent rate. It was a pretty integral part of the machine.
Yeah, I remember the datasheet for this being a real mess, and I spent more time that I should have getting it all to work.
The device doing the control was an ATMega328u4, basic 8-bit AVR, with USB. Basicallly, the sensor was on the side of a piece of transparent PVC tubing watching colored balls fall through (accelerated by gravity). The supervisory process would talk over a serial protocol, looking for a certain colored ball in an array of other colored balls.
header/defines
/******************************************************
* tcs34725
*******************************************************
* defines and methods for the TAOS TCS34725 color
* sensor chip
******************************************************/
#ifndef TCS_34725_H_
#define TCS_34725_H_
/**************************************
* SPI Defines for the chip
**************************************/
// correct chip ID
#define TCS34725_CHIP_ID (0x44)
// SPI address of chip
#define TCS34725_ADDRESS (0x29)
// commands
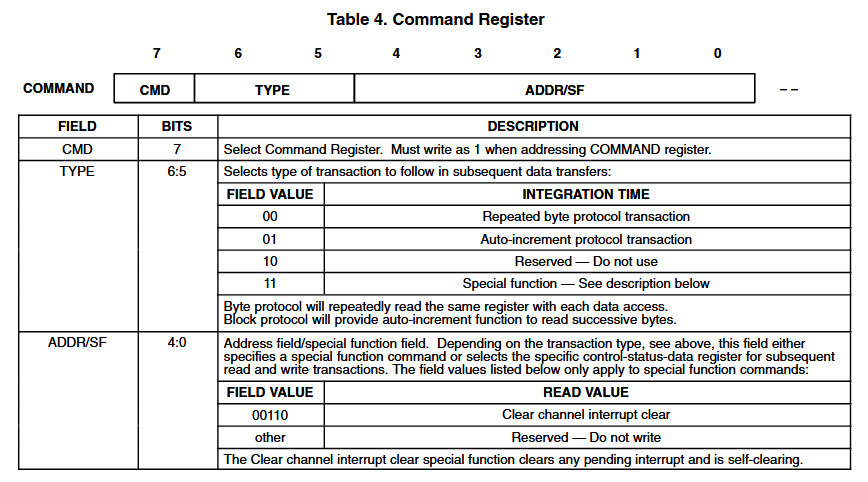
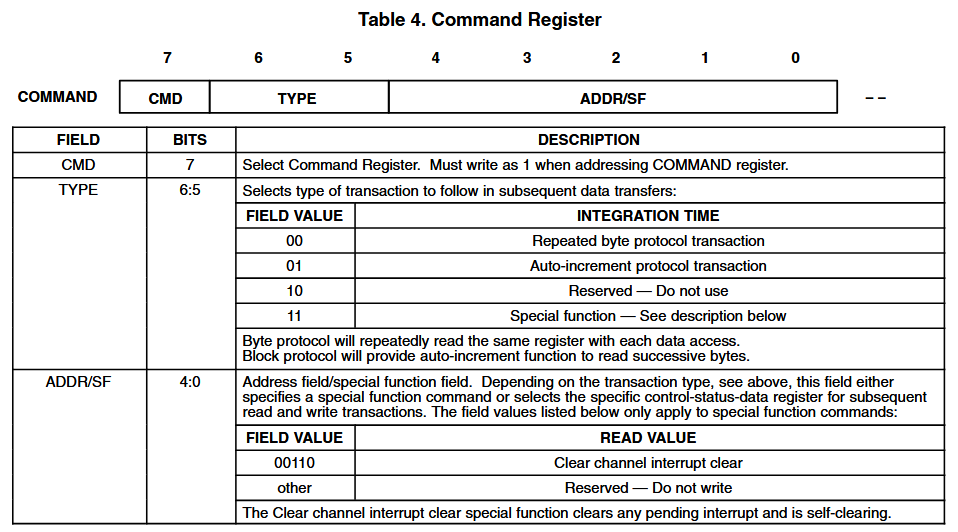
#define TCS34725_COMMAND_BIT (0x80) // bit must be set for any command
#define TCS34725_CMD_REPEATED_BYTE (TCS34725_COMMAND_BIT) // read the same byte over and over and over
#define TCS34725_CMD_AUTO_INC (TCS34725_COMMAND_BIT | 0x20) // after read, read the next byte
#define TCS34725_CMD_SPECIAL (TCS34725_COMMAND_BIT | 0x60) // do something special (only special is next one)
#define TCS34725_CMD_ADDR_CLR_INT (TCS34725_COMMAND_BIT | 0x06) // clear any pending interrupts
// Register addresses
#define TCS34725_ENABLE (0x00)
#define TCS34725_ATIME (0x01) // Integration time
#define TCS34725_WTIME (0x03) // Wait time (if TCS34725_ENABLE_WEN is asserted)
#define TCS34725_AILTL (0x04) // Clear channel lower interrupt threshold
#define TCS34725_AILTH (0x05)
#define TCS34725_AIHTL (0x06) // Clear channel upper interrupt threshold
#define TCS34725_AIHTH (0x07)
#define TCS34725_PERS (0x0C) // Persistence register - basic SW filtering mechanism for interrupts
#define TCS34725_CONFIG (0x0D)
#define TCS34725_CONTROL (0x0F) // Set the gain level for the sensor
#define TCS34725_ID (0x12) // 0x44 = TCS34721/TCS34725, 0x4D = TCS34723/TCS34727
#define TCS34725_STATUS (0x13)
#define TCS34725_CDATAL (0x14) // Clear channel data
#define TCS34725_CDATAH (0x15)
#define TCS34725_RDATAL (0x16) // Red channel data
#define TCS34725_RDATAH (0x17)
#define TCS34725_GDATAL (0x18) // Green channel data
#define TCS34725_GDATAH (0x19)
#define TCS34725_BDATAL (0x1A) // Blue channel data
#define TCS34725_BDATAH (0x1B)
// enable modes/commands for the enable register
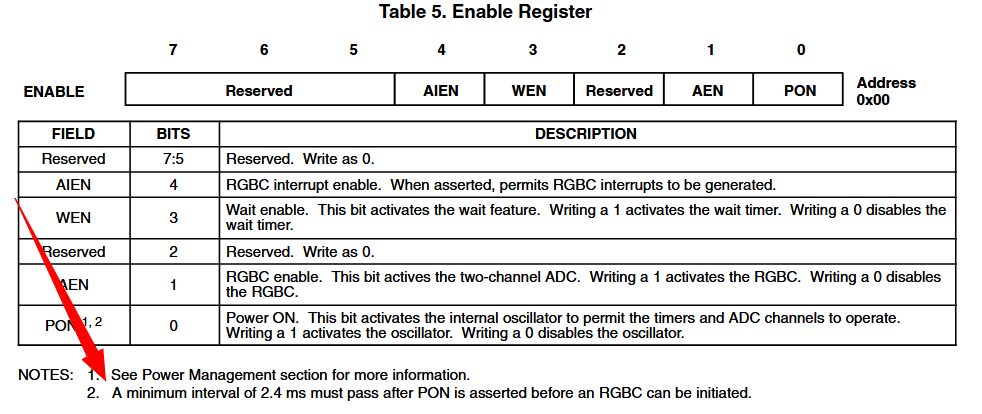
typedef enum {
TCS34725_ENABLE_AIEN = 0x10, // RGBC Interrupt Enable
TCS34725_ENABLE_WEN = 0x08, // Wait enable - Writing 1 activates the wait timer
TCS34725_ENABLE_AEN = 0x02, // RGBC Enable - Writing 1 actives the ADC, 0 disables it
TCS34725_ENABLE_PON = 0x01 // Power on - Writing 1 activates the internal oscillator, 0 disables it
} tcs34725_enable_t;
// wait times for the wait time register
typedef enum {
TCS34725_WTIME_2_4MS = 0xFF, // WLONG0 = 2.4ms WLONG1 = 0.029s
TCS34725_WTIME_204MS = 0xAB, // WLONG0 = 204ms WLONG1 = 2.45s
TCS34725_WTIME_614MS = 0x00 // WLONG0 = 614ms WLONG1 = 7.4s
} tcs34725_wait_t;
// persistence values
typedef enum {
TCS34725_PERS_NONE = 0x00, // Every RGBC cycle generates an interrupt
TCS34725_PERS_1_CYCLE = 0x01, // 1 clean channel value outside threshold range generates an interrupt
TCS34725_PERS_2_CYCLE = 0x02, // 2 clean channel values outside threshold range generates an interrupt
TCS34725_PERS_3_CYCLE = 0x03, // 3 clean channel values outside threshold range generates an interrupt
TCS34725_PERS_5_CYCLE = 0x04, // 5 clean channel values outside threshold range generates an interrupt
TCS34725_PERS_10_CYCLE = 0x05, // 10 clean channel values outside threshold range generates an interrupt
TCS34725_PERS_15_CYCLE = 0x06, // 15 clean channel values outside threshold range generates an interrupt
TCS34725_PERS_20_CYCLE = 0x07, // 20 clean channel values outside threshold range generates an interrupt
TCS34725_PERS_25_CYCLE = 0x08, // 25 clean channel values outside threshold range generates an interrupt
TCS34725_PERS_30_CYCLE = 0x09, // 30 clean channel values outside threshold range generates an interrupt
TCS34725_PERS_35_CYCLE = 0x0a, // 35 clean channel values outside threshold range generates an interrupt
TCS34725_PERS_40_CYCLE = 0x0b, // 40 clean channel values outside threshold range generates an interrupt
TCS34725_PERS_45_CYCLE = 0x0c, // 45 clean channel values outside threshold range generates an interrupt
TCS34725_PERS_50_CYCLE = 0x0d, // 50 clean channel values outside threshold range generates an interrupt
TCS34725_PERS_55_CYCLE = 0x0e, // 55 clean channel values outside threshold range generates an interrupt
TCS34725_PERS_60_CYCLE = 0x0f // 60 clean channel values outside threshold range generates an interrupt
} tcs34725_persistence_t;
// config for long wait times
#define TCS34725_CONFIG_WLONG (0x02) // Choose between short and long (12x) wait times via TCS34725_WTIME
// status values
#define TCS34725_STATUS_AINT (0x10) // RGBC Clean channel interrupt
#define TCS34725_STATUS_AVALID (0x01) // Indicates that the RGBC channels have completed an integration cycle
typedef enum {
TCS34725_INTEGRATIONTIME_2_4MS = 0xFF, // 2.4ms - 1 cycle - Max Count: 1024
TCS34725_INTEGRATIONTIME_4_8MS = 0xFE, // 4.8ms - 2 cycles - Max Count: 2048
TCS34725_INTEGRATIONTIME_9_6MS = 0xFC, // 9.6ms - 4 cycles - Max Count: 4096
TCS34725_INTEGRATIONTIME_24MS = 0xF6, // 24ms - 10 cycles - Max Count: 10240
TCS34725_INTEGRATIONTIME_50MS = 0xEB, // 50ms - 20 cycles - Max Count: 20480
TCS34725_INTEGRATIONTIME_101MS = 0xD5, // 101ms - 42 cycles - Max Count: 43008
TCS34725_INTEGRATIONTIME_154MS = 0xC0, // 154ms - 64 cycles - Max Count: 65535
TCS34725_INTEGRATIONTIME_700MS = 0x00 // 700ms - 256 cycles - Max Count: 65535
} tcs34725_integration_time_t;
typedef enum {
TCS34725_GAIN_1X = 0x00, // No gain
TCS34725_GAIN_4X = 0x01, // 4x gain
TCS34725_GAIN_16X = 0x02, // 16x gain
TCS34725_GAIN_60X = 0x03 // 60x gain
} tcs34725_gain_t;
bool initTCS(tcs34725_integration_time_t intTime, tcs34725_gain_t gain);
bool tcsWrite8(unsigned char addr, uint8_t val);
uint8_t tcsRead8(unsigned char addr);
uint16_t tcsRead16(unsigned char addr);
bool getAllColors(color_array_t* colors);
void tcsWriteIntegrationTime(tcs34725_integration_time_t intTime);
void tcsWriteReceiveGain(tcs34725_gain_t gain);
#endif
tcs334725.c
/******************************************************
* tcs34725
*******************************************************
* methods for the TAOS TCS34725 color sensor chip
*******************************************************/
#include "tcs34725.h"
/**************************************
* get the chip up and running
**************************************/
bool initTCS(tcs34725_integration_time_t intTime, tcs34725_gain_t gain) {
initTWI();
tcsWriteIntegrationTime(intTime);
tcsWriteReceiveGain(gain);
// chip is in low power sleep mode when first powered up. Tell
// it to wake the heck up.
return (tcsWrite8(TCS34725_ENABLE, TCS34725_ENABLE_PON | TCS34725_ENABLE_AEN));
}
/*********************************************
* write a single byte
*********************************************/
bool tcsWrite8(unsigned char addr, uint8_t val) {
return (twiWriteSingleByte(addr, val, false));
}
/***********************************************
* read a single byte
***********************************************/
uint8_t tcsRead8(unsigned char addr) {
uint16_t retVal = twiReadSingleWord(addr);
return ((uint8_t)(retVal >> 8));
}
uint16_t tcsRead16(unsigned char addr) {
return (twiReadSingleWord(addr));
}
/*******************************************
* integration time
*******************************************/
void tcsWriteIntegrationTime(tcs34725_integration_time_t intTime)
{
tcsWrite8(TCS34725_ATIME, (unsigned char)intTime);
}
/*******************************************
* set receiver gain. Gain is the lower
* 2 bits of the control register
********************************************/
void tcsWriteReceiveGain(tcs34725_gain_t gain)
{
tcsWrite8(TCS34725_CONTROL, (unsigned char)gain);
}
bool getAllColors(color_array_t* colors) {
if (twiReadMultipleWords(TCS34725_RDATAL, &colors->red, 3))
{
return (true);
}
return (false);
}
twi.h
/***************************************************
* TWI (I2C) Interface
***************************************************/
#ifndef TWI_H_
#define TWI_H_
void initTWI();
bool twiWriteSingleByte(unsigned char addr, unsigned char data, bool chain);
uint16_t twiReadSingleWord(unsigned char reg);
bool twiReadMultipleWords(unsigned char startReg, uint16_t* data, size_t len);
#endif // define TWI_H_
twi.c
/***************************************************
* TWI (I2C) Interface
***************************************************/
#include "project.h"
#include <util/twi.h>
/***********************************
* initTWI()
************************************
* Set the data and clock pins as
* outputs and set them both high
***********************************/
void initTWI() {
TWSR = 0; // prescaler of one
TWBR = 32; // should make TWI freq 200KHz
//TWBR = 12; // 400KHz
}
/*******************************************
* write a single byte
********************************************
* set 'chain' bool parameter to true if you
* are going to chain another operation after
* this (essentially, don't send a STOP)
********************************************/
bool twiWriteSingleByte(unsigned char addr, unsigned char data, bool chain) {
// Send the start
TWCR = BIT(TWINT) | BIT(TWSTA) | BIT(TWEN);
// wait for it
while (!GETBIT(TWCR, TWINT));
// OK?
if (TW_STATUS != TW_START)
{
#ifdef SENSOR_STDIO
printf_P(PSTR("TWI-W::Start not sent properly, TWSR is 0x%02x\r\n"), TW_STATUS);
#endif
TWCR = 0;
return (false);
}
// SLA+W
unsigned char SLA = TCS34725_ADDRESS;
// seven bit address, shift left one
SLA = SLA << 1;
// clear LSB to indicate a write
SLA &= 0xfe;
TWDR = SLA | TW_WRITE;
TWCR = BIT(TWINT) | BIT(TWEN);
// wait
while (!GETBIT(TWCR, TWINT));
if (TW_STATUS != TW_MT_SLA_ACK)
{
#ifdef SENSOR_STDIO
printf_P(PSTR("TWI-W::SLA+W not sent properly, TWSR is 0x%02x\r\n"), TW_STATUS);
#endif
TWCR = 0;
return (false);
}
// send command code. This is the logic or of the command and register address
unsigned char commandCode = TCS34725_CMD_REPEATED_BYTE | addr;
TWDR = commandCode;
TWCR = BIT(TWINT) | BIT(TWEN);
// wait
while (!GETBIT(TWCR, TWINT));
if (TW_STATUS != TW_MT_DATA_ACK)
{
#ifdef SENSOR_STDIO
printf_P(PSTR("TWI-W::command code not sent properly, TWSR is 0x%02x\r\n"), TW_STATUS);
#endif
TWCR = 0;
return (false);
}
if (!chain)
{
TWDR = data;
TWCR = BIT(TWINT) | BIT(TWEN);
// wait
while (!GETBIT(TWCR, TWINT));
if (TW_STATUS != TW_MT_DATA_ACK)
{
#ifdef SENSOR_STDIO
printf_P(PSTR("TWI-W::data byte not sent properly, TWSR is 0x%02x\r\n"), TW_STATUS);
#endif
TWCR = 0;
return (false);
}
// send the stop
TWCR = BIT(TWSTO) | BIT(TWINT) | BIT(TWEN);
// wait for TWI stop condition
while (!IS_SCL_HIGH && !IS_SDA_HIGH);
TWCR = 0;
}
return (true);
}
/********************************************
* read a single byte
********************************************/
uint16_t twiReadSingleWord(unsigned char reg) {
uint16_t retVal;
if (twiReadMultipleWords(reg, &retVal, 1))
{
return (retVal);
}
return (0);
}
bool twiReadMultipleWords(unsigned char startReg, uint16_t* data, size_t len) {
if (twiWriteSingleByte(startReg, 0, true))
{
// send the repeated start to chain the write with a read
TWCR = BIT(TWSTA) | BIT(TWINT) | BIT(TWEN);
// wait for it
while (!GETBIT(TWCR, TWINT));
// resend the SLA+R, but with the lowest bit set to indicate a read
unsigned char SLA = TCS34725_ADDRESS;
// seven bit address, shift left one
SLA = SLA << 1;
// clear LSB to indicate a write
SLA |= TW_READ;
TWDR = SLA;
TWCR = BIT(TWINT) | BIT(TWEN);
// wait for it
while (!GETBIT(TWCR, TWINT));
if (TW_STATUS != TW_MR_SLA_ACK)
{
#ifdef SENSOR_STDIO
printf_P(PSTR("TWI-R::Failed to write SLA+R, TWSR is 0x%02x\r\n"), TW_STATUS);
#endif
TWCR = 0;
return (false);
}
for (int ii = 0; ii < len; ii++)
{
bool lastByte = false;
if (ii + 1 == len)
{
lastByte = true;
}
// read the low byte and send a master ack
TWCR = BIT(TWINT) | BIT(TWEA) | BIT(TWEN);
// waiting...
while (!GETBIT(TWCR, TWINT));
if (TW_STATUS != TW_MR_DATA_ACK)
{
#ifdef SENSOR_STDIO
printf_P(PSTR("TWI-R::Failed to receive low byte, TWSR is 0x%02x\r\n"), TW_STATUS);
#endif
TWCR = 0;
return (false);
}
uint8_t lowByte = TWDR;
// read the high byte.
TWCR = BIT(TWINT) | BIT(TWEN);
// Set the master ack as long as this isn't the last word we're reading. Not setting
// the ack lets the slave know we're done
if (!lastByte)
{
TWCR |= BIT(TWEA);
}
// waiting...
while (!GETBIT(TWCR, TWINT));
if (lastByte)
{
if (TW_STATUS != TW_MR_DATA_NACK)
{
#ifdef SENSOR_STDIO
printf_P(PSTR("TWI-R::Failed to receive high byte, TWSR is 0x%02x\r\n"), TW_STATUS);
#endif
TWCR = 0;
return (false);
}
}
else if (TW_STATUS != TW_MR_DATA_ACK)
{
#ifdef SENSOR_STDIO
printf_P(PSTR("TWI-R::Failed to receive low byte, TWSR is 0x%02x\r\n"), TW_STATUS);
#endif
TWCR = 0;
return (false);
}
data[ii] = ((uint16_t)(TWDR << 8) | (uint16_t)(lowByte & 0xff));
}
// send the stop
TWCR = BIT(TWINT) | BIT(TWSTO) | BIT(TWEN);
// wait for TWI stop condition
while (!IS_SCL_HIGH && !IS_SDA_HIGH);
}
else
{
#ifdef SENSOR_STDIO
printf_P(PSTR("TWI-R::Failed on first part of combined\r\n"));
#endif
return (false);
}
return (true);
}
implementing…
colorSense.h
/********************************************************
* colorSense
*********************************************************
* 22 June 2017 M.Brugman
*********************************************************
* sense color, duh.
********************************************************/
#ifndef COLOR_SENSE_H_
#define COLOR_SENSE_H_
// initial detection levels; these will be auto tuned
// as things run
#define R_DETECT_LEVEL 300
#define G_DETECT_LEVEL 300
#define B_DETECT_LEVEL 700
// struct to hold color values from sensor
struct _colorarray {
uint16_t red;
uint16_t grn;
uint16_t blu;
};
typedef struct _colorarray color_array_t;
// bit values for colors
#define RED 0
#define GRN 1
#define BLU 2
// colors based on combiation of primary color bit values
#define C_BLACK 0
#define C_RED 1
#define C_GREEN 2
#define C_YELLOW 3
#define C_BLUE 4
#define C_MAGENTA 5
#define C_CYAN 6
#define C_WHITE 7
extern const char* colorNames[];
extern const char colorShortNames[];
void initColorSense(void);
bool processColorSensor();
bool newColorDetected(void);
uint8_t getCurrentColor(void);
const char* printCurrentValues(void);
void updateThresholdValues(uint16_t red, uint16_t green, uint16_t blue);
void readBaselineLight();
#endif // COLOR_SENSE_H_
colorSense.c
/********************************************************
* colorSense
*********************************************************
* 22 June 2017 M.Brugman
*********************************************************
* sense color, duh.
********************************************************/
#include "project.h"
//#define DEBUG_OUT
// color names based on bit values BLU GRN RED (val)
const char* colorNames[] = {"Black", // 0 0 0 0
"Red", // 0 0 1 1
"Green", // 0 1 0 2
"Yellow", // 0 1 1 3
"Blue", // 1 0 0 4
"Magenta", // 1 0 1 5
"Cyan", // 1 1 0 6
"White"}; // 1 1 1 7
const char colorShortNames[] = {'b', 'r', 'g', 'y', 'b', 'm', 'c', 'w'};
static color_array_t colors;
static color_array_t baselineColors;
static bool newColorSeen;
static uint8_t currentColorValue;
static uint16_t saveTime;
void initColorSense(void) {
memset((void*)&baselineColors, 0, sizeof(color_array_t));
memset((void*)&colors, 0, sizeof(color_array_t));
newColorSeen = false;
currentColorValue = C_BLACK;
saveTime = milliseconds;
}
// gets the current readings from the color sensor. Stores them for
// differential comparisons and also sets the threshold detect levels.
void readBaselineLight() {
getAllColors(&baselineColors);
// set threshold levels. Blue sensor is much more sensitive than
// red or green. What's up with that?
xConfig.redThreshold = baselineColors.red * 3 / 2;
xConfig.greenThreshold = baselineColors.grn * 3 / 2;
xConfig.blueThreshold = baselineColors.blu * 3;
}
bool processColorSensor() {
bool retVal = false;
if (getAllColors(&colors))
{
uint16_t* newColorPtr = &colors.red;
uint16_t* baseColorPtr = &baselineColors.red;
uint16_t* threshold = &xConfig.redThreshold;
// loop through the three primary colors
for (size_t ii = RED; ii <= BLU; ii++)
{
// differential between the current color values and the baseline values
int16_t diff = (int16_t)*newColorPtr - (int16_t)*baseColorPtr;
// if this color has currently been seen, see if the color went away
if (GETBIT(currentColorValue, ii))
{
if (diff < ((int16_t)*threshold / 2))
{
CLRBIT(currentColorValue, ii);
newColorSeen = true;
#ifdef DEBUG_OUT
printf_P(PSTR("%s off %d \r\n"),
(ii == 0) ? "Red" : (ii == 1) ? "Green" : (ii == 2) ? "Blue" : "", diff);
#endif
}
}
// otherwise, if the color wasn't present last time, see if it is there now
else
{
if (diff > (int16_t)*threshold)
{
SETBIT(currentColorValue, ii);
#ifdef DEBUG_OUT
printf_P(PSTR("%s on %d/%d\r\n"),
(ii == 0) ? "Red" : (ii == 1) ? "Green" : (ii == 2) ? "Blue" : "", diff, *baseColorPtr);
#endif
newColorSeen = true;
}
}
++newColorPtr;
++baseColorPtr;
++threshold;
}
retVal = true;
}
return (retVal);
}
// Latches the state that a new color was seen until it is read
bool newColorDetected(void) {
if (newColorSeen)
{
newColorSeen = false;
return (true);
}
return (false);
}
// return the last latched color
uint8_t getCurrentColor(void) {
return (currentColorValue);
}
// debug serial out
const char* printCurrentValues(void) {
static char retColors[40];
sprintf(retColors, "R%d G%d B%d", colors.red, colors.grn, colors.blu);
#ifdef SENSOR_STDIO
printf_P(PSTR("%s\r\n"), retColors);
#endif
return (retColors);
}
// save the threshold values to EEPROM
void updateThresholdValues(uint16_t red, uint16_t green, uint16_t blue) {
xConfig.redThreshold = red;
xConfig.greenThreshold = green;
xConfig.blueThreshold = blue;
saveEEPROM();
}```
finally, from main.c
int main(void)
{
cfgSerial(S_BAUD_115200, S_FORMAT_8N1);
#ifdef SENSOR_STDIO
stdin=stdout=&usart0stdio;
#endif
#ifdef SENSOR_SERIAL
initSerialComm();
#endif
setupTimer2();
initEEPROM();
#ifdef SENSOR_STDIO
printf_P(PSTR("\r\nColor Detector %s, reset %ld\r\n\r\n"), VERSION, xConfig.resetCount);
#endif
WDTCSR = BIT(WDCE);
WDTCSR = BIT(WDP3) | BIT(WDP0);
wdt_reset();
initColorSense();
SET_BACKLIGHT_OFF();
if (initTCS(TCS34725_INTEGRATIONTIME_9_6MS, TCS34725_GAIN_60X))
{
sensorStatus = TC_READY;
}
sei();
// TCS34725 dev board has a white balanced LED for target illumination. Turn it on
// now and just leave it on
SET_BACKLIGHT_ON();
uint16_t count = 0;
uint32_t lastCountTime = milliseconds;
bool grabbedBaseline = false;
// init array of balls
resetCount();
while (true)
{
// get the first baseline light & color levels
if (!grabbedBaseline && milliseconds > 2500)
{
grabbedBaseline = true;
readBaselineLight();
printCurrentValues();
}
// don't bother trying to detect colors until we've set
// baseline and target threshold levels
else
{
processColorSensor();
if (checkForBall())
{
lastCountTime = milliseconds;
++count;
}
}
// reset ball count, baseline, and threshold a short time
// after the last ball was seen
if (count && (milliseconds - lastCountTime > 5000))
{
count = 0;
readBaselineLight();
printCurrentValues();
pulseDebugLED(500);
}
// any periodic debug stuff
if (!(milliseconds % 1000))
{
//printCurrentValues();
}
if (grabbedBaseline)
{
processSerial();
}
if (ledCount)
{
--ledCount;
if (!ledCount)
{
SET_DEBUG_LED(false);
}
}
// one half millisecond tick (or task) time
do
{
;
} while (isrMilliseconds == isrLastMilleseconds);
wdt_reset();
}
return 0;
}
/*****************************************************
* System tick ISR. Once each half millisecond
*****************************************************/
ISR(TIMER2_COMPA_vect, ISR_BLOCK)
{
static volatile uint8_t even = 0;
if (!((++even) % 2))
{
++milliseconds;
}
++isrMilliseconds;
}
/*********************************************************
* checkForBall()
**********************************************************
* See if any balls were detected recently
*********************************************************/
bool checkForBall()
{
bool ballFound = false;
// see if there was a new ball
if (newColorDetected())
{
uint8_t newColor = getCurrentColor();
// black would mean a ball just went away; don't bother annunciating that
if (newColor != C_BLACK)
{
ballFound = true;
pulseDebugLED(100);
// don't overrun
if (ballArrayIndex >= BALL_ARRAY_SIZE - 1)
{
sensorStatus = TC_FULL;
}
else
{
// separate values with a colon
if (ballCount)
{
ballArray[ballArrayIndex++] = ':';
sensorStatus = TC_COUNTING;
}
// add a char for the ball detected
ballArray[ballArrayIndex++] = colorShortNames[newColor];
++ballCount;
}
#ifdef SENSOR_STDIO
printf_P(PSTR("%d: %s\r\n"), ballCount, colorNames[newColor]);
#endif
}
}
return (ballFound);
}
I think I still have some of the sensors around from the proto days in a box somewhere. I can hook one up if you need more data, but I’m afraid I’m late to this party…