I agree with that. The workflow on my current project is to connect up the BP for UART, start bridge (or my new “glitch” command), and then power up the device and let the command execute.
In my personal branch I disabled the sanity checks to be able to do this.
I just reported a new minor bug in github, but one that I think is important to the 1.0 release. Beginners will copy/paste examples. In the process, they may copy an extra space. This causes a syntax error in the bus commands.
Example:
[]
[]
The second line causes a syntax error. This can cause confusion as someone may think they pasted the correct command from the example.
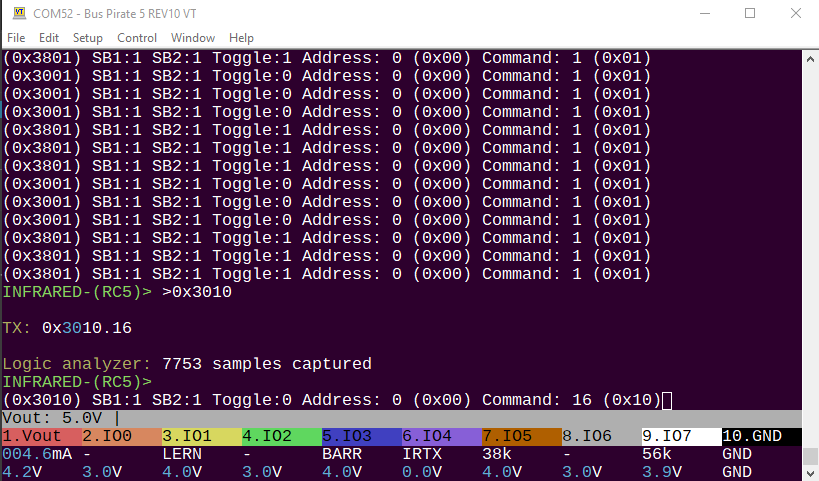
Infrared mode sends and receives NEC and RC5 remote control protocols. You’ll need to bring an IR LED and demodulator, or use something like the Infrared Toy plank. Soon I will add a binary mode compatible with LIRC (is that still a thing?), AnalysIR, etc.
I failed at my first attempt to port DirtyJtag to the Bus Pirate with a reusable “SDK”. I learned a lot about how it needs to be structured though, another attempt is on the way.
Fixes:
Logic command shows help when no options specified
Fixed several regressions in LED mode when using the onboard LEDs for the beginner tutorial. Additionally, the FALA will switch to the internal LED data out pin when using the onboard LEDs, so you can see what is happening (5 only, much more extensive changes needed to make this work on 6 that need some SDK bug fixes).
I2C mode demo commands general error handling and reporting improved
Tried to make the no pullups/no power warning less obnoxious in I2C and 1-wire mode
Whitespace (space characters) before syntax (>[or]) no longer cause an error
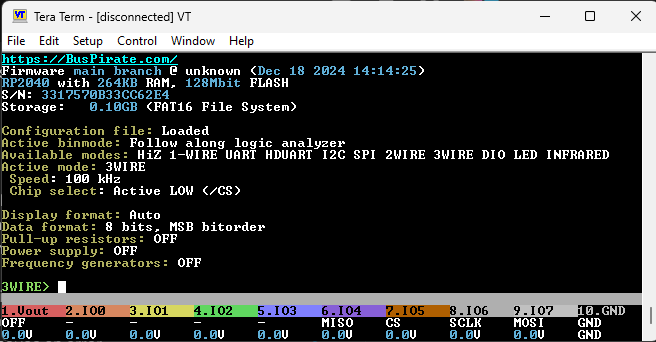
There is a new 3WIRE mode, which is like SPI but you can manipulate the clock and MOSI pins independently using the /-_ syntax. This is useful for oddball devices that use reset, start bits, and opcodes that are not 8 bit bytes. For example, the 93LC66B uses a start bit and 2 bit opcodes which are not compatible with the typical 8bit I2C bus.
3WIRE mode added
Fix display of bit commands /-_ state (2WIRE, 3WIRE)
New firmware timestamp format
Fixes during the initialization sequence, and ongoing improvements to deadlock situations (h/t @henrygab)
A factory mode to disable unique serial port numbers (h/t @henrygab)
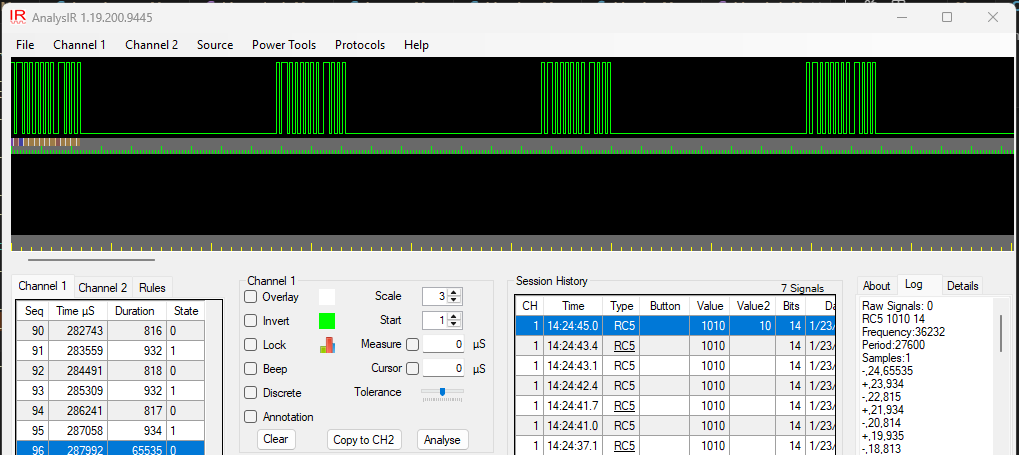
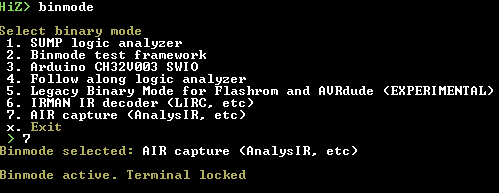
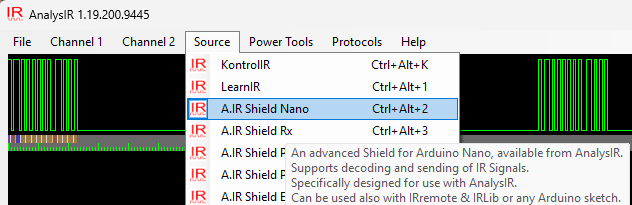
The latest firmware now supports AnalysIR, popular infrared signal analysis software for Windows. It is a paid program, with Educational, Maker and Pro versions available. Note that the free version does not support external hardware.
You will need an infrared demodulator and infrared diode, or use the IR Toy plank.
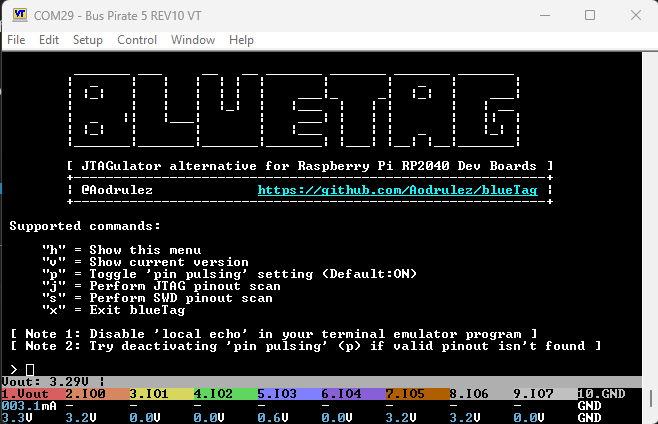
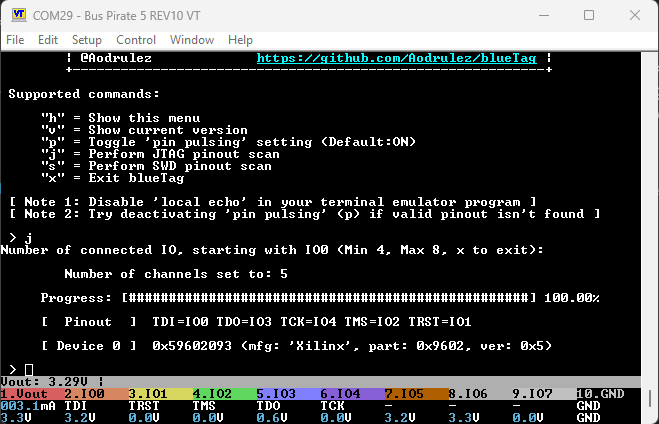
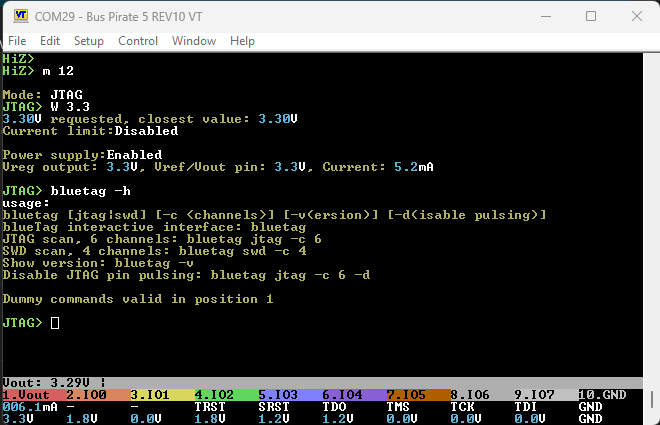
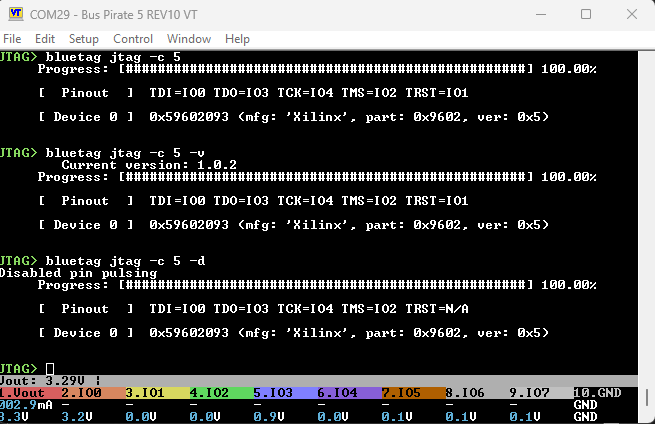
I’m about to post about the I2C sniffer, and see I missed a huge addition: bluetag JTAG and SWD pin finder is now integrated in the main Bus pirate firmware.
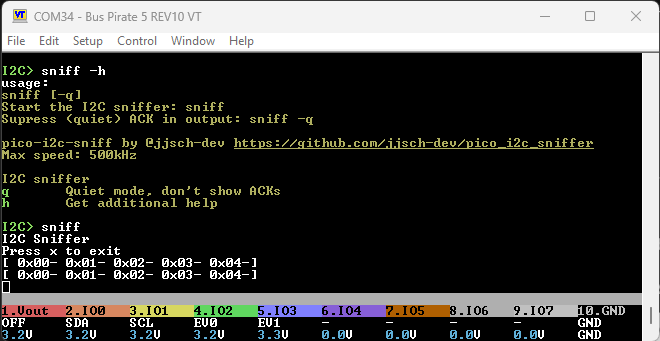
The output is similar to the I2C command syntax. Sniffed packets can be pasted into the command line and replayed.
The q quiet flag hides the ACK (+) indicator to make it easier to replay commands without editing the sniffer output. NAKs (-) will still be displayed.
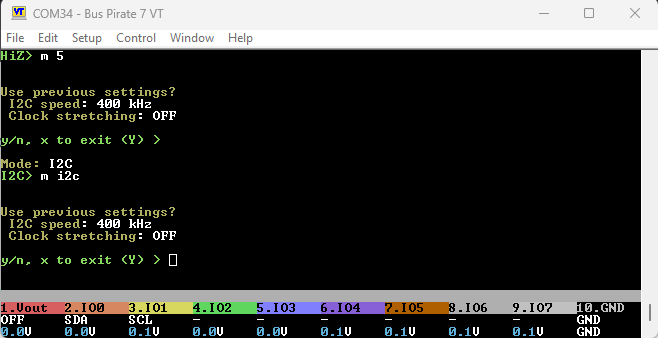
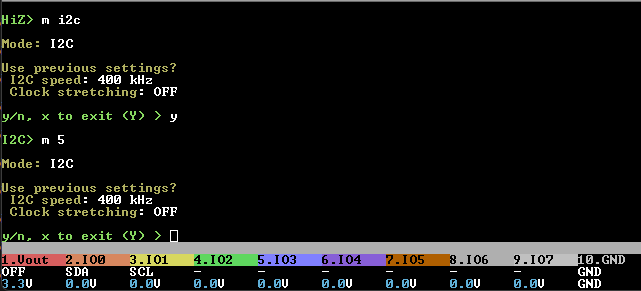
I think the mode: indication should probably be moved to the start of the output. Then we can consolidate the “XXX speed:” translation to a single “Speed:”. Will push asap.
The last few months have been a lot of grunt work updating docs and tweaking features, but there some announcement worthy updates coming down the line!
DDR5 memory modules for computers have an Serial Presence Detect Hub chip that contains info needed to configure the SRAM. I2C mode has a new command ddr5 for working with SPD Hub chips. This can be useful for:
Rescuing a DDR5 stick with corrupted SPD data
Cloning “secret” keys inserted by manufacturers to lock equipment to their own RAM sticks
Just generally learning about SPD, which is pretty cool!
ddr5 probe shows the SPD Hub status and contents of the SPD Non Volatile Memory (EEPROM). It searches through the undefined block to find hidden info. Here we probably have Intel or AMD overclocking profiles in block 10-15.
I2C> ddr5 read -f backup.bin
Read SPD NVM to file: backup.bin
Device Type: 0x5118
Success :)
I2C> ddr5 verify -f backup.bin
Verifying SPD NVM against file: backup.bin
Device Type: 0x5118
Success :)
Of course you can read and verify the SPD contents.